large-scale RGB+D Database
through comprehensive performance analysis.




Overview
We introduce an RGB-D scene dataset consisting of more than 200 indoor / outdoor scenes.
This dataset contains synchronized RGB-D frames from both Kinect v2 and Zed stereo camera. For the outdoor scene, we first generate disparity maps using an accurate stereo matching method and convert them using calibration parameters. A per-pixel confidence map of disparity is also provided. Our scenes are captured at various places, e.g., offices, rooms, dormitory, exhibition center, street, road etc., from Yonsei University and Ewha University
This dataset has been used to train convolutional neural networks in our project [1] and for our papers[2], [3], [4], [5]
"High quality 2D-to-multiview contents generation from large-scale RGB-D database", under Grant by the Institute for Information and Communications Technology Promotion(IITP) through the Korean Government(MSIP)(R0115-16-1007)
Citations
If you use this dataset in your research, please cite these publications :
- DIML/CVL RGB-D technical_report : This material is presented to provide a detailed description about the DIML/CVl RGB-D dataset.
- Y. Kim, B. Ham, C. Oh, and K. Sohn, "Structure selective depth super-resolution for RGB-D cameras," IEEE Trnas. on Image Processing, vol.25, no. 11, pp. 5527-38, Nov. 2016. [Paper]
- S. Kim, D. Min, B. Ham, S. Kim, and K. Sohn, "Deep Stereo Confidence Prediction for Depth Estimation," IEEE International Conference on Image Processing, Sept. 2017. [Paper]
- Y. Kim, H. Jung, D. Min, and K. Sohn, "Deep Monocular Depth Estimation via Integration of Global and Local Predictions," IEEE Trnas. on Image Processing, vol.27, no. 8, pp. 4131-43, Aug. 2018. [Paper]
- J. Cho, D. Min, Y. Kim, and K. Sohn, "Deep Monocular Depth Estimation Leveraging a Large-scale Outdoor Stereo Dataset," Expert Systems with Applications, Mar. 2021. [Paper]



Sample Data
Do you want to preview our dataset?Indoor Data
Kinect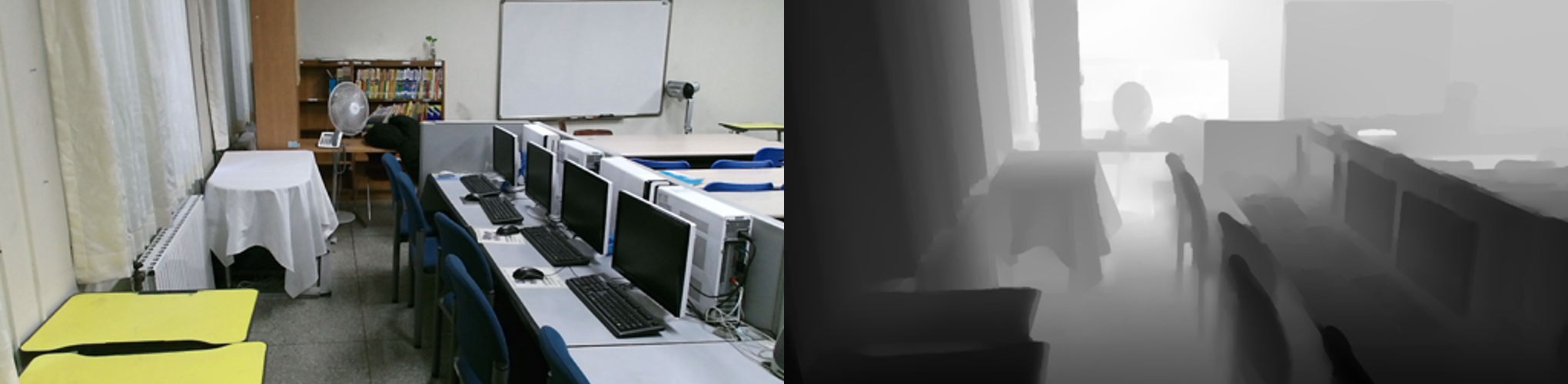
- depth_field : filled depth images using colorization (mm, 16bit png)
- depth_raw : Raw depth images (mm, 16bit png)
- depth_v : Normalized depth images for visualization purpose (8bit png)
- color : Color images obtained from Kinect v2 (8bit png)
Outdoor Data
ZED
- Left Left images obtained from ZED camera (8bit png)
- Right : Right images obtained from ZED camera (8bit png)
- Disparity : Disparity maps obtained by stereo matching (8bit png)
- Depth : Disparity -> Depth (mm, 16bit png)
- Confidence : Confidence maps for stereo matching (8bit png)